NAME
i.ortho.camera - Select and modify the imagery group camera reference file.KEYWORDS
imagery, orthorectifySYNOPSIS
Flags:
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- group=name
- Name of imagery group for ortho-rectification
- camera=name [required]
- Name of camera reference file
- Name of input file
- name=string
- Camera name
- id=string
- Camera id
- clf=float
- Calibrated focal length
- pp=east,north
- Principal point coordinates
- Coordinates
- fid=east,north[,east,north,...]
- Fiducial coordinates
- Coordinates
Table of contents
DESCRIPTION
i.ortho.camera creates or modifies entries in a camera reference file. For ortho-photo rectification, a camera reference file is required for computation of scanned image to photo-coordinate transformation parameters. There are two coordinate systems: The image coordinate system (in pixels) and the photo coordinate system (in milli-meters). The inner orientation establishes a relation between the pixels and the image coordinates with help of fiducial marks.The first prompt in the program will ask you for the name of the camera reference file to be created or modified. You may create a new camera reference file by entering a new name, or modify an existing camera reference file by entering the name of an existing camera file.
After entering the camera file name, following menu is displayed:
Please provide the following information
CAMERA NAME: camera name______
CAMERA IDENTIFICATION: identification___
CALIBRATED FOCAL LENGTH mm.:_________________
POINT OF SYMMETRY (X) mm.:_________________
POINT OF SYMMETRY (Y) mm.:_________________
MAXIMUM NUMBER OF FIDUCIALS:_________________
AFTER COMPLETING ALL ANSWERS, HIT <ESC> TO CONTINUE
(OR <Ctrl-C> TO CANCEL)
The camera name and identification describe the camera reference file.
The calibrated focal length and the point of symmetry are used in computing
the photo-to-target transformation parameters. These values should be entered
from the camera calibration report (usually available from the photograph
supplier).
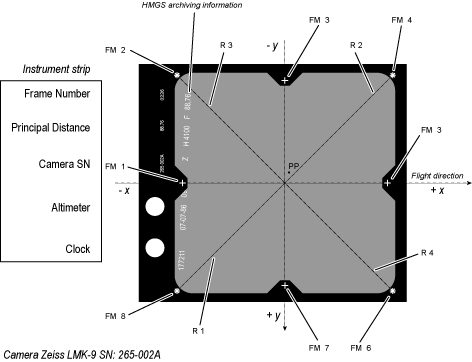
This example is the camera Zeiss LMK9 265-002A belonging to the Hellenic
Military Geographical Survey (HMGS) and calibrated in December 1985
The photo coordinate system origin is the so-called calibrated principal point (PP, Principal Point of Symmetry) which is in the center of the image. The origin of the axes is at the intersection of the radii traced from the fiducial marks. In the ideal case of no deviations in the camera (see camera calibration certificate) the center is the origin and the values are 0 for both X and Y of Point of Symmetry. But usually the principal point does not fall on the intersection of the radii at the center of the picture. This eccentricity is usually of the order of a few micrometers.
You are then asked to enter the X and Y photo coordinates of each fiducial as follows. These fiducials (or reseau) marks are index marks imaged on film which serve as reference photo coordinate system. The maximum number of fiducials will determine the number of fiducial or reseau coordinate pairs to be entered below. The origin is the center of the image (or the point of symmetry) and X and Y are left-right and up-down. The order is up to the user, but must be kept consistent throughout the rectification process.
On this screen you should enter the fiducial or reseau photo-coordinates as given in the camera calibration report. The X, and Y coordinates are in milli-meters from the principle point.
Please provide the following information
Fid# FID ID X Y
1__ _____ 0.0___ 0.0___
2__ _____ 0.0___ 0.0___
3__ _____ 0.0___ 0.0___
4__ _____ 0.0___ 0.0___
5__ _____ 0.0___ 0.0___
6__ _____ 0.0___ 0.0___
7__ _____ 0.0___ 0.0___
8__ _____ 0.0___ 0.0___
9__ _____ 0.0___ 0.0___
10_ _____ 0.0___ 0.0___
next: end__
AFTER COMPLETING ALL ANSWERS, HIT <ESC> TO CONTINUE
(OR <Ctrl-C> TO CANCEL)
The input display is repeated until the number of MAXIMUM FIDUCIALS
is reached.
SEE ALSO
i.ortho.photo, i.photo.2image, i.photo.2target, i.ortho.initAUTHOR
Mike Baba, DBA Systems, Inc.SOURCE CODE
Available at: i.ortho.camera source code (history)
Latest change: Thu Feb 3 11:10:06 2022 in commit: 73413160a81ed43e7a5ca0dc16f0b56e450e9fef
Main index | Imagery index | Topics index | Keywords index | Graphical index | Full index
© 2003-2022 GRASS Development Team, GRASS GIS 8.0.3dev Reference Manual